图像分割
此为应朋友需求写的代码改核心而来,仅供参考 图源https://zhuanlan.zhihu.com/p/57405494

图像读取(Image Read)
% 单图片读取方式
img = imread("image.jpg"); %image.jpg为图源
% 从视频的某一帧读取,此处注释
% vid = VideoReader("video.jpg")
% frame = read(vid,index);
一定的加工(Process Image)
加工方案1
% 灰度化
grayFrame = rgb2gray(img);
% 二值化
bw = imbinarize(grayFrame,"adaptive","Sensitivity",0.7);
% 反转颜色
bw = not(bw);
% 填充孔洞
bw = imfill(bw,"holes");
这里使用了 imfill来填充图片内部的孔洞,也可以用imopen和imclose进行处理,但是需要注意精度,其中需要not反转的原因主要是气泡是黑色的,二值化处理之后其他背景部分都是白色的,
只有气泡是黑色的,黑色对应的是0,不是1,其他地方对应的都是1,如果黑色的反而是缺陷处了,如果使用imfill会直接将黑色气泡的洞填掉,这一点尤为需要注意
加工方案2
grayFrame = rgb2gray(img);
bw = imbinarize(grayFrame,"adaptive","Sensitivity",0.7);
bw = not(bw);
% 形态学开闭运算去噪
bw = imopen(bw, strel('disk', 2));
bw = imclose(bw, strel('disk', 3));
(下面此行解释来源于deepseek)
解释:形态学开运算是先腐蚀后膨胀,用于去除小物体和平滑边界,而闭运算是先膨胀后腐蚀,用于填充小孔和连接邻近物体。结构元素的大小(如strel('disk',3))决定了操作的强度,较大的结构元素会影响更大的区域。
上面的imfill好处在于单个气泡的填充,忽视了一些图像过滤的方面,形态学开和闭运算则是直接去掉一些大小不满足的气泡,不过,因为先膨胀后腐蚀的原因,需要注意一下图像的精确度,有可能会丢失一些边缘信息
图像分割(image segmentation)
% 设定区域的最小像素数量
minArea = 20;
% 分割图像,其中bw后跟的是你所需要的参数,现在是面积,还有当前所在
stats = regionprops(bw, 'Area', 'Centroid', 'BoundingBox');
areas = [stats.Area];
invalidIdx = find(areas<minArea);
stats(invalidIdx) = [];
其中stats返回的是个struck结构,如果你使用stats.Area去获取它的属性,它只会给你第一个的值,但是如果你使用[stats.Area],则可以获取到完整的所有的struck结构的值,
然后使用将stats(invalidIdx) = [];删除面积小于20的区域,以前我好像还没啥批量删除的思路,可能还要考虑从后往前删,现在matlab这边貌似可以直接批量把要删的内容块直接设置为空内容就行了
以下是stats的返回值,其他你所需要的返回值可以参考官网链接
stats =
包含以下字段的 15×1 struct 数组:
Area
Centroid
BoundingBox
其中就按照然后是从上到下,从左到右的顺序逐个标记区域,返回的值包含你想要的东西,也就是image(x,y)
三维可视化图像
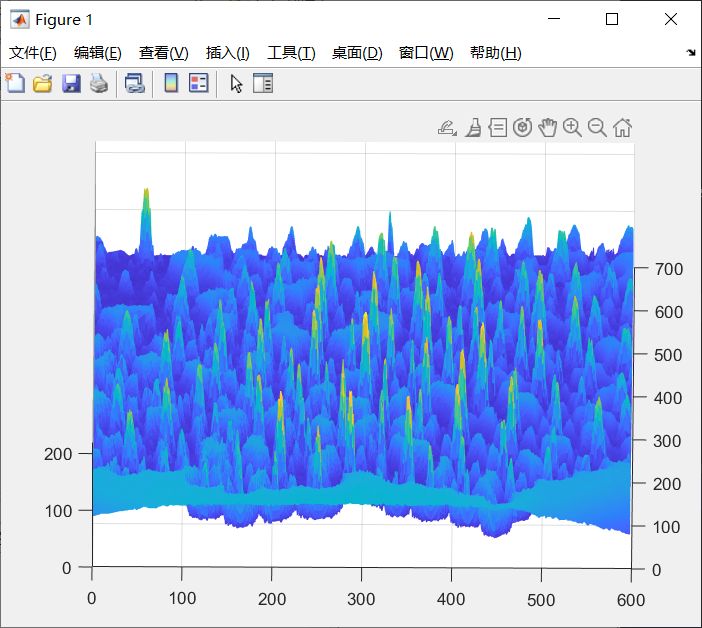
就拿上面的那张灰度化后的图举例吧,mesh函数可视化之后会变成上图
绘制过程
假设你想绘制的灰度图是上面那张灰度化之后的grayFrame图片,我先说过程再解释原因
[a,b] = size(grayFrame);
x = linspace(1,b,b);
y = linspace(1,a,a);
[X,Y] = meshgrid(x,y);
mesh(X,Y,grayFrame)
绘制需要三个数据,X,Y,grayFrame,其中grayFrame是个矩阵,$598\cdot670$大小的矩阵,我目前可以构建的是,先框定$598\cdot670$的绘制框架,再增加一个维度的它的像素数据,这就是三维了
回忆一下plot的绘制,需要x和y的数据要一一对应,这里也一样,由于绘制的是个3D曲面,我们需要掌握到所有$598\cdot670$个点的X,Y,Z的坐标的值,此时meshgrid函数就派上用场了,
先用x = linspace(1,b,b);获取到1到a的所有整数数列,linspace()函数详解见此,y同理
其中$a = 598,b = 670$,那么x和y生成出来分别是$x:1\cdot598,y:1\cdot670$两个一维向量,然后交给meshgrid这两个向量就会生成对应的上面需要的X和Y,其中X和Y都是$598\cdot670$大小的
你可以如此理解这两个矩阵,如果把它可视化在有坐标轴的位置,其中规定(0,0)是图像左上角,670的长是x轴的1到670的位置,然后598是y轴1到598的位置, 这里也有$598\cdot670$,刚好能放下$598\cdot670$个图像的数据对吧?而且刚好能移植过来,此时这$598\cdot670$所有点的横坐标,全提出来也就是一个$598\cdot670$的矩阵,这就是上面的X,Y也如此,也就是对应着每个图像像素点的Y的值
再提一嘴,此时X,Y,grayFrame的矩阵大小都是$598\cdot670$,mesh只要读取$598\cdot670$次,每次读取都可以读到一个像素的X值(X中来),Y值(Y中来),以及像素值(grayFrame中来),这样就完成了